Stefan Official
Offline
• •
Upload & Sell: Off
|
 p.2 #11 · Goodbye Fiddly Ball Heads � Why the Leofoto LH-40GR Rocks p.2 #11 · Goodbye Fiddly Ball Heads � Why the Leofoto LH-40GR Rocks | |
Hi jtra,
interesting � I honestly hadn�t seen this in a long time and therefore didn�t really have it on my radar anymore. Your solution is fundamentally not bad. However, without knowing it for sure, I suspect that there is no clearly defined tilt axis. When you adjust one screw, you inevitably influence at least two axes at the same time. That makes the setup more labor-intensive and less intuitive overall. Maybe you could briefly comment on that � with the Leofoto solutions this is not the case.
A geared panning movement is available neither on the LH-40GR nor on the G2 (which does not have a ball head anyway). Personally, I don�t see this as a disadvantage. You can set the base so that it has very pleasant friction, allowing for smooth and well-damped rotation. Alternatively, you can fully loosen it to do a 360-degree panorama without having to turn a geared mechanism.
If you absolutely want panning to be geared as well, the G20 head would be an option � but it weighs roughly twice as much. In the end, it comes down to priorities. Everyone has different requirements and use cases.
Over the last few days I�ve been shooting with about 3 kg of load on the LH-40GR and had zero issues with accuracy, flex, or stability. Absolutely precise. The adjustment via the small control wheels works very well � not too stiff, not too loose, just right.
Regarding astrophotography: I use a Benro astro tracker that can be calibrated using any star from its internal database. I usually choose a star in the Milky Way, as in my experience this allows for more precise calibration than a classic polar alignment. The Benro does not require Polaris and is one of the few mobile astro trackers that works without a classical Polaris alignment.
Calibration is done purely electronically. There is no need to mechanically adjust the tripod once it is set up. You simply center the selected star precisely, and all remaining inaccuracies are compensated internally. As a result, I don�t have the extreme tilt angles that are typically required for a classical polar alignment.
My LH-40GR head only needs to be properly leveled. The more accurate the leveling, the longer the possible exposure times. The Benro tracker itself also only needs to be leveled precisely � perfectly horizontal. Everything else is compensated in software.
In practice, I achieve around 8 minutes of exposure time when working carefully, before stars start to drift into neighboring pixels on the sensor. That is more than sufficient for me, as I rarely expose longer than about 6 minutes per single frame. At f/1.8 it often becomes too bright anyway at around ISO 400. When I�m traveling light, this is never deep-sky work, but ultra-wide-angle up to maybe 50 mm at most.
The main reason I chose this solution is the following: I am often at locations � for example at lakes � with 30�40 meter tall trees or steep rock faces behind me. In such situations there is no view of Polaris (lake facing south, trees or rock walls to the north). Many astro trackers simply cannot be used there because they strictly rely on polar alignment. With my setup, I can shoot anywhere as long as a few stars are visible in the sky, regardless of direction. Ideally, I choose a star located roughly in the same direction as the subject I intend to photograph later.
Regarding shops:
fotokoch.de, fotoprofi.de, foto-erhardt.de, calumet.de, astroshop.de, teleskop-express.de, and enjoyyourcamera.com have all been around for many years and are absolutely reputable. I have ordered from all of them multiple times.
I also looked at your website � very interesting, thank you for that. However, when it comes to mobile astro trackers, our setups are quite different. For that reason, I can�t say with complete certainty whether my solution would be ideal for you.
At home, I additionally use a large mount, but I would never take that on a hike. In that case, a guide scope is also used to compensate for tracking inaccuracies over many hours.
In guiding, the star is not treated as a single pixel, but as a brightness profile spread over many pixels. This allows position changes on the order of fractions of a pixel to be detected � long before a star would visibly move or elongate on the main imaging sensor. Any tiny deviation is detected and corrected immediately, long before the main camera would register any visible star movement.
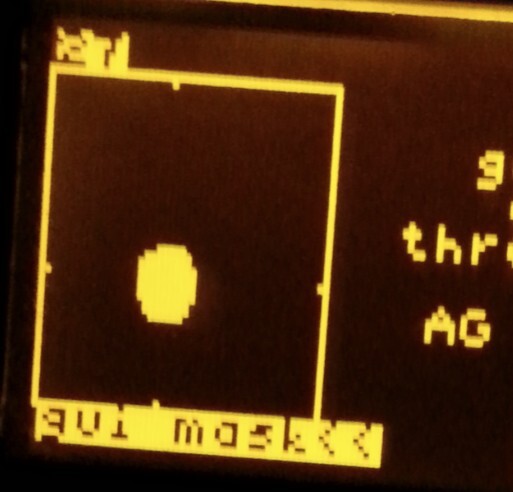
I�ll add a few screenshots to make the guide-scope concept clearer:
� The first screenshot shows the resolution of a guide star. This is significantly finer than in the main camera, where in extreme cases a star may occupy only a single pixel.
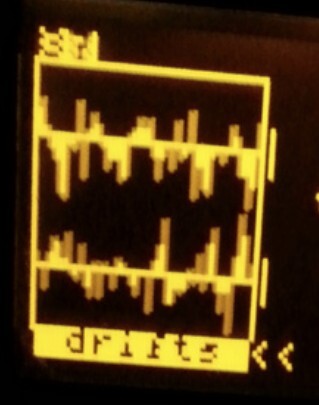
� The second screenshot shows the stepper-motor corrections that keep the guide star perfectly centered � long before the main camera could detect any deviation.
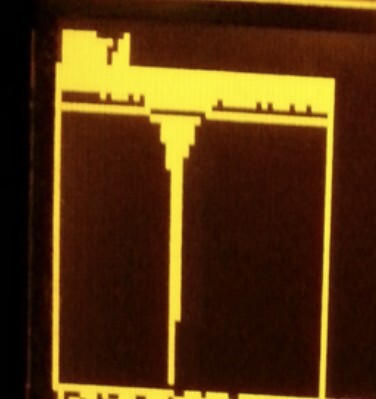
� The final screenshot shows focus quality. The narrower and cleaner the peak, the more precisely the focus is set.
|



 .
.